ARRANCADOR SUAVE , VARIADOR DE VELOCIDAD
- DEFINICIÓN : Es un dispositivo o conjunto de dispositivos mecánicos, hidráulicos, eléctricos o electrónicos empleados para controlar la velocidad giratoria de maquinaria, especialmente de motores. También es conocido como Accionamiento de Velocidad Variable (ASD, también por sus siglas en inglés Adjustable-Speed Drive). De igual manera, en ocasiones es denominado mediante el anglicismo Drive, costumbre que se considera inadecuada. La maquinaria industrial generalmente es accionada a través de motores eléctricos, a velocidades constantes o variables, pero con valores precisos. No obstante, los motores eléctricos generalmente operan a velocidad constante o casi-constante, y con valores que dependen del abastecimiento y de las características propias del motor, los cuales no se pueden modificar fácilmente. Para lograr regular la velocidad de los motores, se emplea un controlador de equipos especiales que recibe el nombre de variador de velocidad. Los variadores de velocidad se emplean en una amplia gama de aplicaciones industriales, como en ventiladores y equipo de aire acondicionado, equipo de bombeo, bandas y transportadores industriales, elevadores, llenadoras, tornos y fresadoras, etc. Un variador de velocidad puede consistir en la combinación de un motor eléctrico y el controlador que se emplea para regular la velocidad del mismo. La combinación de un motor de velocidad constante y de un dispositivo mecánico que permita cambiar la velocidad de forma continua (sin ser un motor paso a paso) también puede ser designado como variador de velocidad.

- POR QUÉ USAR UN VARIADOR DE VELOCIDAD
El control de procesos y el ahorro de la energía son dos de las principales razones para el empleo de variadores de velocidad. Históricamente, los variadores de velocidad fueron desarrollados originalmente para el control de procesos, pero el ahorro energético ha surgido como un objetivo tan importante como el primero.
Entre las diversas ventajas en el control del proceso proporcionadas por el empleo de variadores de velocidad destacan:
- Operaciones más suaves.
- Control de la aceleración.
- Distintas velocidades de operación para cada fase del proceso.
- Compensación de variables en procesos variables.
- Permitir operaciones lentas para fines de ajuste o prueba.
- Ajuste de la tasa de producción.
- Permitir el posicionamiento de alta precisión.
- Control del Par motor (torque).
Un equipo accionado mediante un variador de velocidad emplea generalmente menor energía que si dicho equipo fuera activado a una velocidad fija constante. Los ventiladores y bombas representan las aplicaciones más llamativas. Por ejemplo, cuando una bomba es impulsada por un motor que opera a velocidad fija, el flujo producido puede ser mayor al necesario. Para ello, el flujo podría regularse mediante una válvula de control dejando estable la velocidad de la bomba, pero resulta mucho más eficiente regular dicho flujo controlando la velocidad del motor, en lugar de restringirlo por medio de la válvula, ya que el motor no tendrá que consumir una energía no aprovechada.
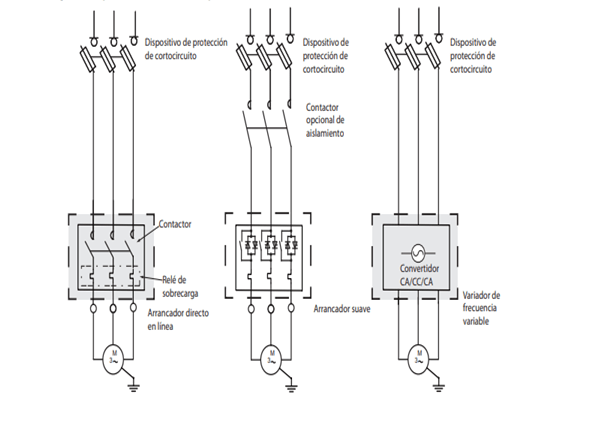
TIPOS :
En términos generales, puede decirse que existen tres tipos básicos de variadores de velocidad: mecánicos, hidráulicos y eléctrico-electrónicos. Dentro de cada tipo pueden encontrarse más subtipos, que se detallarán a continuación. Cabe aclarar que los variadores más antiguos fueron los mecánicos, que se emplearon originalmente para controlar la velocidad de las ruedas hidráulicas de molinos, así como la velocidad de las máquinas de vapor.
Los variadores de velocidad mecánicos e hidráulicos generalmente son conocidos como transmisiones cuando se emplean en vehículos, equipo agroindustrial o algunos otros tipos de maquinaria.
- Variadores mecánicos :
- Variador de paso ajustable: este dispositivo emplea poleas y bandas en las cuales el diámetro de una o más poleas puede ser modificado.
- Variador de tracción: transmite potencia a través de rodillos metálicos. La relación de velocidades de entrada/salida se ajusta moviendo los rodillos para cambiar las áreas de contacto entre ellos y así la relación de transmisión.

- Variadores hidráulicos :
- Variador hidrostático: consta de una bomba hidráulica y un motor hidráulico (ambos de desplazamiento positivo). Una revolución de la bomba o el motor corresponde a una cantidad bien definida de volumen del fluido manejado. De esta forma la velocidad puede ser controlada mediante la regulación de una válvula de control, o bien, cambiando el desplazamiento de la bomba o el motor.
- Variador hidrodinámico: emplea aceite hidráulico para transmitir par mecánico entre un impulsor de entrada (sobre un eje de velocidad constante) y un rotor de salida (sobre un eje de velocidad ajustable). También llamado acoplador hidráulico de llenado variable.
- Variador hidroviscoso: consta de uno o más discos conectados con un eje de entrada, los cuales estará en contacto físico (pero no conectados mecánicamente) con uno o más discos conectados al eje de salida. El par mecánico (torque) se transmite desde el eje de entrada al de salida a través de la película de aceite entre los discos. De esta forma, el par transmitido es proporcional a la presión ejercida por el cilindro hidráulico que presiona los discos.

- Variadores eléctrico-electrónicos :
Existen cuatro categorías de variadores de velocidad eléctrico-electrónicos:
- variadores para motores de CC.
- variadores de velocidad por corrientes de Eddy.
- variadores de deslizamiento.
- variadores para motores de CA (también conocidos como variadores de frecuencia).
- APLICACIONES :
Los Variadores de Velocidad son aplicados, fundamentalmente, en los siguientes tipos de máquinas:
- Transportadoras: Controlan y sincronizan la velocidad de producción de acuerdo al tipo de producto que se transporta, para dosificar, para evitar ruidos y golpes en transporte de botellas y envases, para arrancar suavemente y evitar la caída del producto que se transporta, etc.
- Bombas y ventiladores centrífugos: Controlan el caudal, uso en sistemas de presión constante y volumen variable. En este caso se obtiene un gran ahorro de energía porque el consumo varía con el cubo de la velocidad, o sea que para la mitad de la velocidad, el consumo es la octava parte de la nominal.
- Bombas de desplazamiento positivo: Control de caudal y dosificación con precisión, controlando la velocidad. Por ejemplo en bombas de tornillo, bombas de engranajes. Para transporte de pulpa de fruta, pasta, concentrados mineros, aditivos químicos, chocolates, miel, barro, etc.
- Ascensores y elevadores: Para arranque y parada suaves manteniendo la cupla del motor constante, y diferentes velocidades para aplicaciones distintas.
- Extrusoras: Se obtiene una gran variación de velocidades y control total de de la cupla del motor.
- Centrífugas: Se consigue un arranque suave evitando picos de corriente y velocidades de resonancia.
- Prensas mecánicas y balancines: Se consiguen arranques suaves y mediante velocidades bajas en el inicio de la tarea, se evitan los desperdicios de materiales.
- Máquinas textiles: Para distintos tipos de materiales, inclusive para telas que no tienen un tejido simétrico se pueden obtener velocidades del tipo random para conseguir telas especiales.
- Compresores de aire: Se obtienen arranques suaves con máxima cupla y menor consumo de energía en el arranque.
- Pozos petrolíferos: Se usan para bombas de extracción con velocidades de acuerdo a las necesidades del pozo.
- Aplicaciones industriales :
La instalación de los variadores de velocidad nace de dos motivos principales: el mejoramiento en el proceso de operación del equipo y el ahorro de energía eléctrica. Su instalación puede conllevar los dos fines o solamente uno, para esto es importante conocer los procesos industriales y sus necesidades, lo que implica conocer los tipos y clases de carga que existen, y que básicamente se dividen en tres:
- Carga de par constante: Es la carga que demanda del motor un par constante en cualquier rango de velocidad en que éste trabaje. En este tipo de carga el motivo principal para la aplicación de los variadores de velocidad es la optimización del proceso y rara vez hay ahorro de energía.
- Carga de par variable: Es el tipo de carga en la que las necesidades del par disminuyen conforme lo hace la velocidad del motor, y por consiguiente las de la carga también disminuyen. Este tipo de carga se encuentra comúnmente en las aplicaciones de flujo variable, como ventiladores, bombas centrífugas, agitadores y compresores axiales. En este caso el variador de velocidad ofrece grandes oportunidades de ahorro de energía, pues los requerimientos de potencia disminuyen conforme lo hace la velocidad del motor.
- Carga de potencia constante: Es la carga donde no importa la velocidad a que está girando el motor, para demandar la potencia máxima, pues así lo exige la carga. Este tipo de carga se encuentra básicamente en máquinas herramientas, bobinadoras, dobladoras, troqueladoras y bombas centrífugas de alta inercia. En estas cargas difícilmente se puede obtener ahorro de energía, debido a que el proceso exige el máximo de potencia en cualquier rango de velocidad.
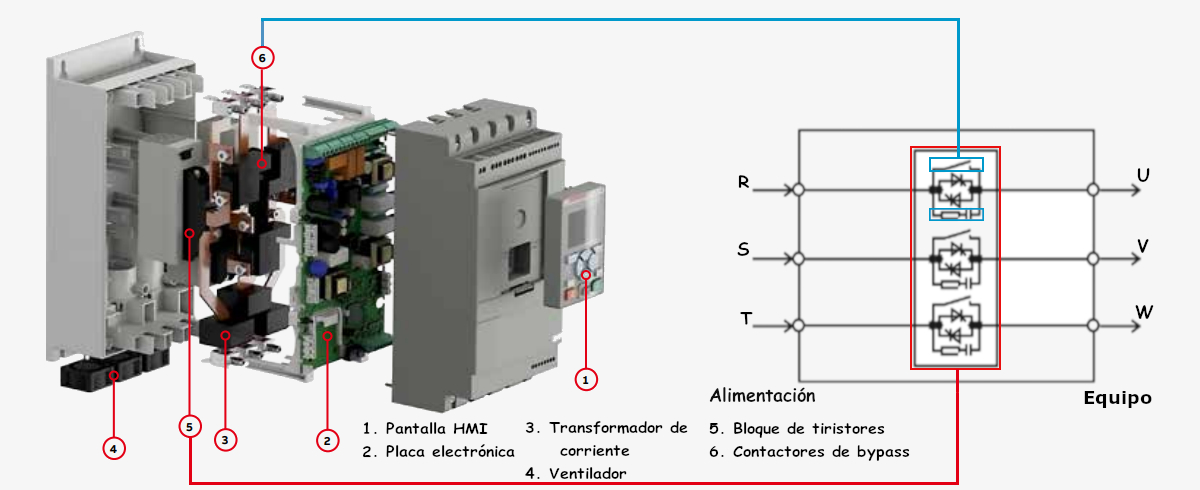
- arrancador suave :
Un arrancador suave es un dispositivo electrónico que se usa para ayudar a proteger el motor eléctrico . No todos los motores están equipados con arrancadores suaves, pero se han convertido en algo común, especialmente con motores delicados que pueden dañarse fácilmente por la afluencia repentina de energía. Los arrancadores suaves consisten en una serie de rectificadores que trabajan juntos para administrar el voltaje. Los arrancadores electrónicos se denominan arrancadores suaves o progresivos.

- CARACTERÍSTICAS :
Se utilizan en aplicaciones donde el par de arranque no es alto (aplicaciones con fluidos, bombas , ventiladores, etc.). Suministran al motor una tensión variable desde un valor bajo hasta el valor nominal del motor, de modo que se evitan las interrupciones de tensión. En general, permiten regular el tiempo de subida y el voltaje inicial.
Producen perturbaciones en la red eléctrica (armónicos), por lo que en algunos casos deben ir acompañados de filtros electrónicos. También permiten un frenado suave del motor. Por lo general, limitan la intensidad de arranque a valores que no excedan tres veces la intensidad nominal del motor. Pueden o no estar acompañados por un contactor , aunque es recomendable traerlos. Por lo general, incluyen protección contra sobrecarga.
- ¿Arrancador suave o variador de frecuencia?
La principal diferencia entre ambos es que con el arrancador suave no se puede controlar la velocidad del motor. Un variador de frecuencia permite entre otras opciones regular la velocidad del motor en cualquier momento, no sólo en el arranque y parada.
Cuando se necesita disminuir el pico de corriente únicamente en el arranque y parada, se utilizará un arrancador suave.
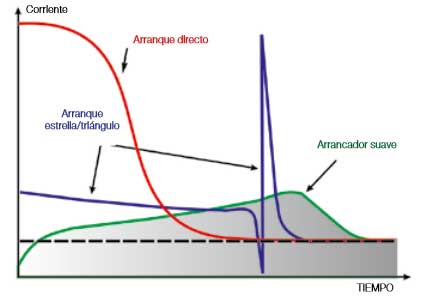
¿Qué diferencia hay en arrancar un motor con arrancador suave de un arranque con estrella/triángulo?
En comparación con el arranque en estrella-triángulo, los arrancadores suaves permiten realizar un arranque suave sin riesgo de transitorios y con rampas de arranque las cuales limitan la corriente.
Las principales ventajas de los arrancadores estrella / triángulo son:
• Cuando se utiliza para iniciar una carga extremadamente ligera, pueden limitar la corriente de arranque a
un nivel más bajo que un arrancador suave. Sin embargo, se pueden producir importantes transitorios de
corriente y par.
Arrancadores estrella / triángulo ofrecen un rendimiento limitado debido a que:
• El par de arranque no se puede ajustar para adaptarse a las características del motor y de la carga.
• Existe una transición abierta entre ls conexiones estrella y triángulo que perjudica el par y los transitorios
de corriente.
• No se pueden acomodar a las condiciones de carga variables (por ejemplo, con o sin carga inicial)
• No pueden proporcionar una parada suave
- FUNCIONAMIENTO :
El arrancador suave tiene en común con el convertidor de frecuencia un dispositivo electrónico basado en tiristores. Se puede decir que, en términos de funcionalidad y precio, ocupa el espacio entre los arrancadores estrella-triángulo y los inversores de frecuencia . Con los arrancadores suaves, el voltaje del motor se puede controlar para que aumente gradualmente durante el arranque. Por supuesto, esto también limita la intensidad de arranque, lo que resulta en un arranque suave y minimiza las tensiones mecánicas y eléctricas. Con este dispositivo también puede obtener una parada suave.
El problema de los arranques repentinos y violentos ha acompañado a los motores eléctricos a lo largo de su historia. Aunque se han probado varias soluciones a lo largo de los años, hay muy pocas soluciones que puedan resolver este problema.
Rectificadores de silicona controlados
La mayoría de los arrancadores suaves están hechos de interruptores de estado sólido conocidos como rectificadores controlados de silicona o SCR . Tienen un trabajo simple: regular el voltaje para que el motor reciba primero una onda de bajo voltaje, que sube hasta que el motor comienza a girar, ahorrando desgaste y a menudo ayudando a los componentes electrónicos a durar más. Los interruptores se encienden en rápida sucesión para dejar pasar más y más voltaje.

Métodos de arranque :
Parametrización de un arrancador suave
A continuación haremos una breve descripción de los parámetros más importantes que se deben ajustar en un arrancador suave. No todos los parámetros mencionados están disponibles en todos los arrancadores y algunos otros parámetros no mencionados pueden encontrarse según el tipo, marca y modelo de arrancador. Los ajustes pueden realizarse mediante potenciómetros, dip switches, teclado o vía software.
Rampa de arranque
En este parámetro lo que se ajusta es el tiempo que dura dicha rampa de arranque, es decir, el tiempo que transcurre mientras los tiristores aplican la tensión inicial al motor y la incrementan hasta alcanzar la tensión nominal. La rampa de arranque no debe ser muy larga ya que esto genera un calentamiento innecesario del motor y un riesgo de disparo del relé de sobrecarga.
Un error muy común es pensar que este parámetro ajusta el tiempo de arranque del motor. El tiempo de arranque del motor es el tiempo que demora en alcanzar la velocidad nominal. Si el motor está muy cargado probablemente el tiempo de arranque será mayor al tiempo de rampa, es decir, una vez aplicada la tensión nominal el motor continuará acelerando hasta alcanzar la velocidad de régimen, mientras que si el motor se encuentra descargado muy probablemente alcance la velocidad nominal antes de finalizar la rampa de arranque, con lo cual el tiempo de rampa sería mayor que el tiempo de arranque.
Rampa de parada
Se usa especialmente cuando se necesita una detención suave del motor, por ejemplo, en una bomba o cinta transportadora cargada de objetos frágiles.
En este parámetro lo que se ajusta es el tiempo que tardan los tiristores en reducir la tensión nominal aplicada al motor hasta un valor de tensión final preestablecido. Si el tiempo de rampa se ajusta a cero se obtiene una parada libre, sin control.
Tensión inicial
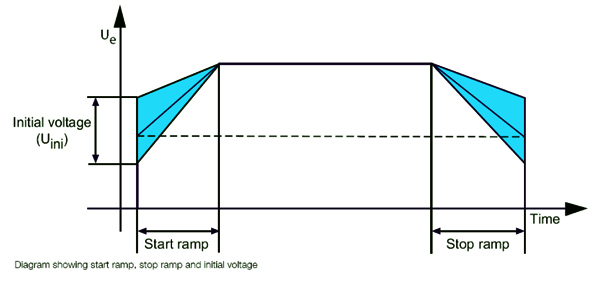
Es el valor de tensión desde el cual comienza la rampa de arranque. Este dependerá de la carga que se intente arrancar. Una carga muy pesada requerirá un valor de tensión inicial bastante elevado, mientras que en una carga liviana no será necesario.
Es sabido que el torque depende cuadráticamente de la tensión, entonces si ajustamos el valor de tensión inicial en un 20%, el valor del torque caerá a un 4% y el motor no arrancará (0,2 x 0,2 = 0,04).
Es muy importante regular este valor de tensión inicial adecuadamente para no generar calentamientos indeseados en el motor mientras intenta arrancar.
Tensión final
Es el valor de tensión en el cual finaliza la rampa de parada y se corta la alimentación al motor.
Corriente nominal
Este parámetro permite ajustar la corriente nominal del arrancador a la real consumida por el motor.
Este parámetro va a afectar a otros relacionados con la corriente como, por ejemplo, el valor de disparo del relé de sobrecarga, la corriente límite para el arranque y la corriente de rotor bloqueado.
Control de torque
Es una función que va a controlar el torque del motor en lugar de controlar la tensión aplicada. Es especialmente útil para detener bombas evitando el golpe de ariete que se genera en una parada libre y también, aunque en menor medida, en una parada suave controlada por tensión. Los arrancadores que poseen control de torque permiten seleccionar el modo de rampa de tensión o rampa de torque, tanto en el arranque como en la parada.
Límite de corriente
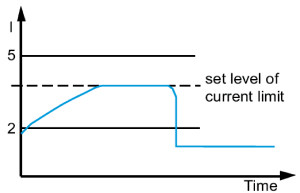

Este parámetro se utiliza en aplicaciones en que la corriente de arranque no debe superar un valor preestablecido, o también en arranques pesados en los que se hace muy difícil obtener un buen resultado controlando únicamente la tensión inicial y el tiempo de rampa de arranque.
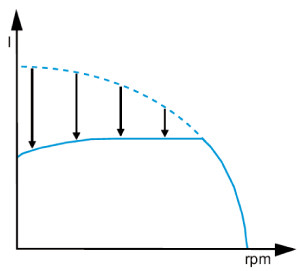
La rampa de arranque se inicia normalmente incrementando la tensión y la corriente, pero cuando la corriente alcanza el valor límite la tensión deja de incrementarse por un tiempo hasta que la corriente se reduzca y de este modo continúa la rampa de tensión sin sobrepasar el límite de corriente.
Como la corriente máxima (arranque directo) se va reduciendo a medida que aumenta la velocidad del motor, es posible ir incrementando la tensión gradualmente sin superar la corriente límite.
En la figura anterior se observa cómo la rampa de tensión queda segmentada en tres partes. Una inicial, en donde se incrementa la tensión; una segunda etapa, en donde la tensión permanece constante en el tiempo a fin de no exceder el límite de corriente, y una tercera parte en que la rampa de tensión continúa incrementándose hasta alcanzar la tensión nominal.
Abajo podemos observar el comportamiento de la corriente que comenzará incrementándose hasta que al llegar al valor límite se mantendrá constante, y finalmente caerá al valor de corriente nominal una vez finalizado el arranque cuando el motor haya alcanzado la velocidad de régimen.
Coordinación
Cuando hablamos de coordinación en una salida a motor nos referimos a un conjunto de aparatos eléctricos que utilizados en conjunto garantizan la protección de las personas y los mismos aparatos eléctricos, incluso ante fallas.
El conjunto de elementos coordinados debe cumplir con cuatro funciones básicas que se detallan a continuación:
- Protección contra sobrecargas
- Control del motor
- Protección contra cortocircuitos
- Aislación
La protección contra sobrecargas es responsable de proteger motor y cables contra sobrecalentamientos generados por cualquier corriente comprendida entre la nominal y la corriente de rotor bloqueado. Este dispositivo deberá enviar una señal de disparo a un elemento capaz de desconectar al motor de la red. Normalmente para ello se utiliza al contactor de línea.
El control del motor se refiere a la conexión y desconexión del mismo y normalmente quien se encarga de esta función es el contactor de línea.
La protección contra cortocircuito será responsable de disipar todas las corrientes que se encuentren por encima de la corriente de rotor bloqueado, por ejemplo corrientes de cortocircuito.
Cuando mencionamos aislación nos referimos a que debe existir un elemento que garantice una aislación en aire para seguridad del personal operador.
La norma IEC 60947-4-2 define dos tipos de coordinación de acuerdo al nivel de continuidad de servicio esperado:
Coordinación tipo 1: La coordinación tipo 1 establece que bajo una condición de cortocircuito no se deben generar daños a las personas ni a la instalación, pero los dispositivos de maniobra afectados deberán ser reparados o reemplazados para volver a prestar servicio.
Coordinación tipo 2: La coordinación tipo 2 establece que bajo una condición de cortocircuito no se deben generar daños a las personas ni a la instalación, pero los elementos coordinados deben seguir funcionando correctamente garantizando así la continuidad del servicio.
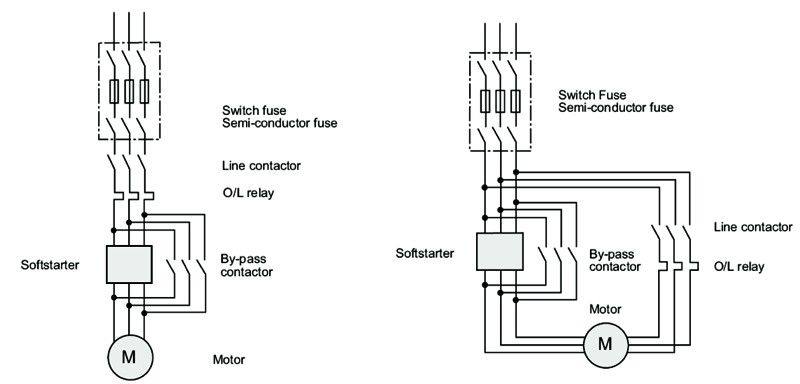
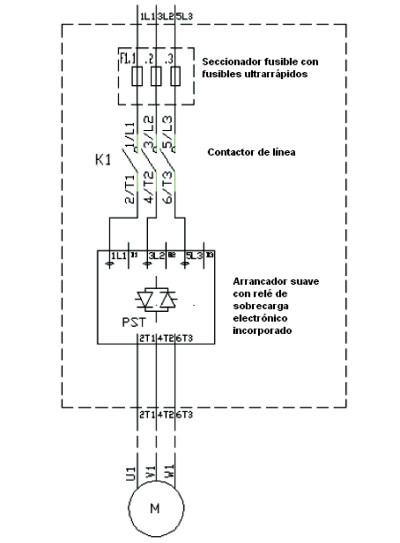
A continuación un esquema de salida a motor con arranque suave recomendado por ABB para garantizar coordinación tipo 2.
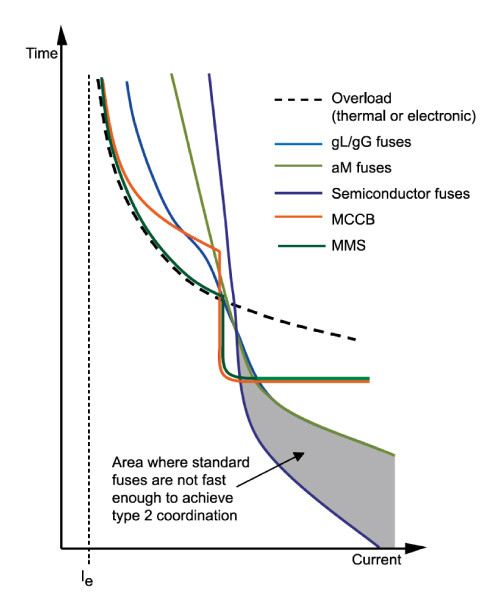
Para poder garantizar una coordinación tipo 2 deben utilizarse fusibles ultrarrápidos, ya que son los únicos elementos capaces de proteger al softstarter ante un cortocircuito. El arrancador suave tiene internamente tiristores que son semiconductores y la velocidad de apertura de un interruptor es demasiado lenta para protegerlos. Lo mismo sucede con un fusible común. No es lo suficientemente rápido para abrir el cortocircuito antes de que se destruyan los tiristores del arrancador suave.
Las coordinaciones garantizadas por ABB se basan en ensayos realizados en laboratorio y los fusibles que se indican en las tablas de coordinación están calculados para limitar la energía pasante (I2t) que es la única forma de garantizar la protección del arrancador.
A continuación podemos ver las distintas curvas de los elementos de protección más utilizados.
A lo largo de estas tres entregas hemos repasado algunos conceptos básicos de motores, diferentes métodos de arranque y particularidades de los arrancadores suaves.
Este último método viene creciendo gradualmente en base instalada y la tendencia indica que pronto será el más utilizado en el mercado.
ABB está preparada para enfrentar este desafío con sus tres líneas actuales (PSR, PSE y PST) y creará un nuevo concepto en arranques suaves presentando la nueva familia PSTX con la capacidad tecnológica e innovación de alta calidad que la caracteriza.
